



Page content
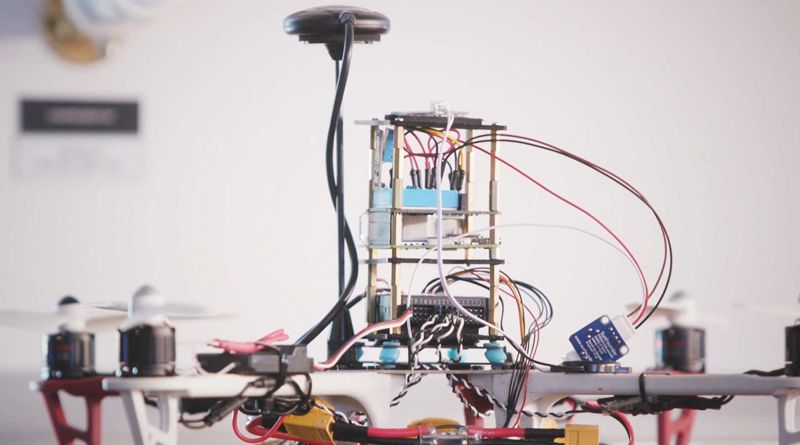
Maneuverable Autonomous Drone for Navigation and Intelligence (MADNI), is an in-house IoT-driven Unmanned Aerial Vehicle (UAV) developed at School of Engineering, Ulster University.
Engineered by Dr. Usman Hadi and his research team, MADNI boasts IoT-driven technology with locally crafted features, including 5G standalone connectivity, obstacle avoidance, object detection, facial recognition and real-time video streaming.
Video
How MADNI works
5G Connectivity Utilizes high-speed 5G connectivity for faster and more reliable communication, enabling seamless data transfer and control over larger distances.
Obstacle Avoidance Enhances safety during flight by autonomously detecting and avoiding obstacles.
Object Detection Provides the capability to identify and track various objects, facilitating applications in surveillance, monitoring, and data collection.
Facial Recognition Enables the drone to recognize and identify individuals, which can be valuable in security and search-and-rescue scenarios.
Real-time Video Streaming Offers live video streaming capabilities, allowing users to remotely monitor and assess situations in real-time.
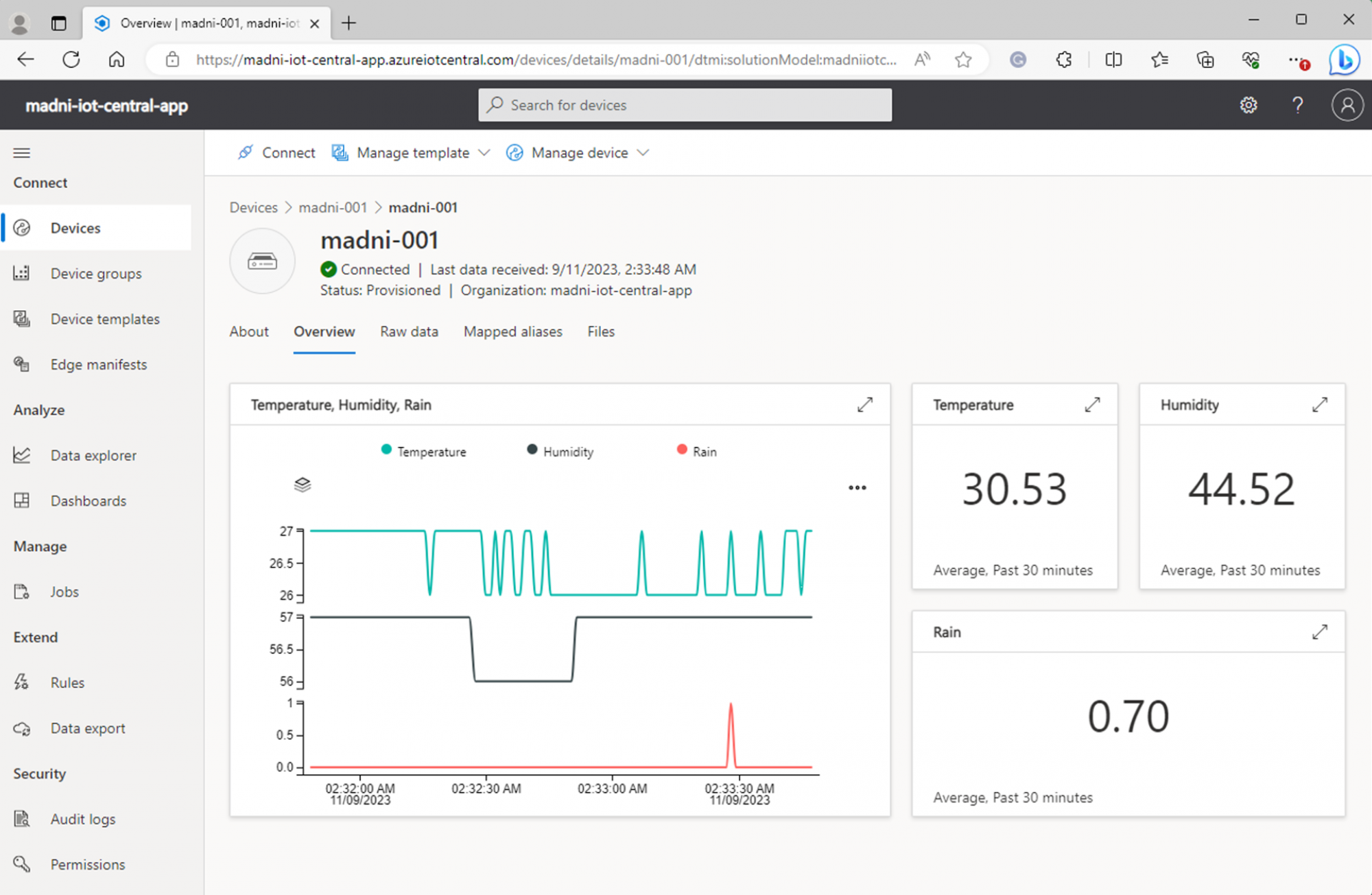
IoT Integration Incorporates Internet of Things (IoT) technology, enhancing connectivity and enabling the drone to interact with other devices and systems.
Autonomous Navigation Capable of autonomous navigation, reducing the need for constant human intervention and making it suitable for various applications.
MADNI Drone

MADNI Analytics
Research Outputs
- Ahmad, T., Hadi, M.U., Vassiliou, V., Dimitriou, L., Anwar, A. and Tran, T.A. (2025), Real-Time Anomaly Detection in Smart Vehicle-To-UAV Networks for Disaster Management. Trans Emerging Tel Tech, 36: e70162. https://doi.org/10.1002/ett.70162
- C. Rose, A. Shah, R. McMurray and M. U. Hadi, "Digital Twin-Driven Hybrid Control for MADNI Stability in Adverse Conditions," 2024 26th International Multi-Topic Conference (INMIC), Karachi, Pakistan, 2024, pp. 1-6, doi: 10.1109/INMIC64792.2024.11004360.
- C. Rose, R. McMurray and M. U. Hadi, "A Reinforcement Learning Control and Fault Detection Method for the MADNI Drone," 2024 35th Irish Signals and Systems Conference (ISSC), Belfast, United Kingdom, 2024, pp. 1-6, doi: 10.1109/ISSC61953.2024.10602956.
- R. Rajathanakodi and M. U. Hadi, "MAD-STORM: Maneuverable Autonomous Drone with Sensing Technologies for Observing Rainfall and Meteorology in Northern Ireland," 2024 35th Irish Signals and Systems Conference (ISSC), Belfast, United Kingdom, 2024, pp. 1-6, doi: 10.1109/ISSC61953.2024.10603132.
- Abbasi, AB, Hadi, MU. Optimizing UAV computation offloading via MEC with deep deterministic policy gradient. Transactions on Emerging Tel Tech. Oct. 2023; e4874. doi: 10.1002/ett.4874
- Gibson, J.; Hadi, M.U. Modeling and Optimal Control for Rotary Unmanned Aerial Vehicles in Northern Ireland Climate. Appl. Sci. 2022, 12, 7677. https://doi.org/10.3390/app12157677
- Muhammad Usman Hadi, Jack Gibson. Enhancing Rotary Unmanned Aerial Vehicle (RUAV) Stability in Challenging Wind Conditions: A Reinforcement Learning Approach. Intl J Robust Nonlinear. Nov, 2023.
Research Funding
- Innovate UK Research Grant, Dr. Usman Hadi (PI), (April 2025 – Present)
- British Council Going Global Partnerships Research Grant, Dr. Usman Hadi (PI), (Feb 2025 – Present)
- Research and Impact Fund, Dr. Usman Hadi (PI), (Dec 2023 – July 2024)
- Proof of Principle grant, R&I, Dr. Usman Hadi (PI), (June 2024 – Present)
- Research and Impact Fund 2024, Dr. Usman Hadi (PI), (Dec 2024 – Present)









